Distributed Multi Agent Navigation Based On Orca And Mapf Solving Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background to Distributed Multi Agent Navigation Based On Orca And Mapf Solving

RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Python Implementation of Reciprocal Velocity Obstacle (RVO) for CL-MAPF: Multi-Agent Path Finding for Car-Like Robots with Kinematic and Spatiotemporal Constraints MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation Introduction to the Optimal Reciprocal Collision Avoidance model for An implicit coordination planner implemented on the robot solves
In this Course, I will take you from the very basics of Talk by Oren Salzman in TAU CG seminar 24-Nov-2021. Reciprocal Velocity Obstacles for real-time multi-agent navigation : 12 agents Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable
Important Facts

Explore the primary sources for Distributed Multi Agent Navigation Based On Orca And Mapf Solving.
Developments

Stay updated on Distributed Multi Agent Navigation Based On Orca And Mapf Solving's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Distributed Multi Agent Navigation Based On Orca And Mapf Solving from verified contributors.
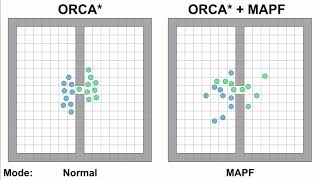
Distributed Multi-agent Navigation Based on ORCA and MAPF solving

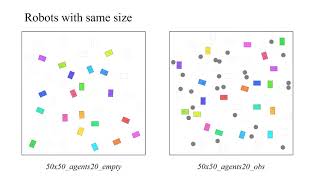
Multi-Agent Path Finding (MAPF)
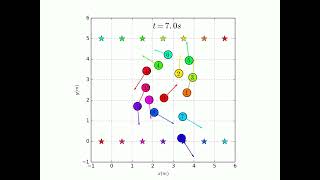
Multi-agent navigation with reciprocal collision avoidance based on velocity obstacle
Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: May 26, 2026
Future Outlook

For 2026, Distributed Multi Agent Navigation Based On Orca And Mapf Solving remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:

















